PID Kontrol: Otomasyon Beyni
PID Kontrol Nedir?
PID (Proportional-Integral-Derivative), endüstriyel süreç kontrolünde en yaygın kullanılan kontrol algoritmasıdır. Sıcaklık, basınç, seviye, hız gibi değişkenleri hedef değerde tutmak için kullanılır.
PID Neden Gerekli?
Senaryo: Fırın sıcaklığını 150°C'de tutmak istiyorsunuz.
Basit Kontrol (On-Off): Sıcaklık 149°C → Isıtıcı aç, 151°C → Isıtıcı kapat. Sonuç: Sürekli salınım.
PID Kontrol: Hedefe yaklaşırken yavaşlar, hedefte hassas kalır, kararlı kontrol sağlar.
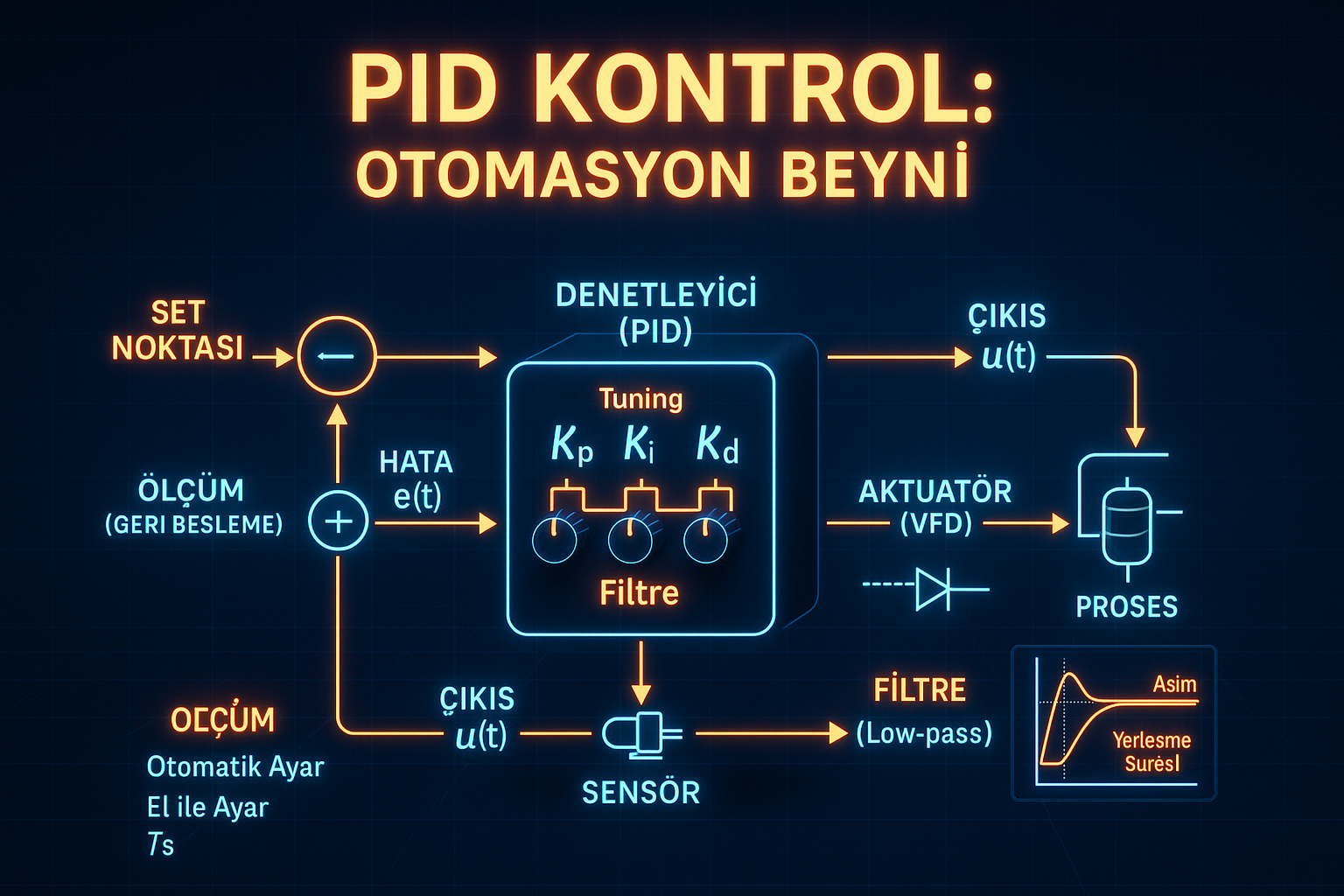
PID Bileşenleri
1. P (Proportional): Mevcut hata ile orantılı çıkış. Hızlı tepki ama steady-state hata bırakır.
2. I (Integral): Geçmiş hataların toplamı. Steady-state hatayı sıfırlar ama aşıma neden olabilir.
3. D (Derivative): Hatanın değişim hızı. Salınımı azaltır ama gürültüye duyarlı.
PID Formülü
Çıkış = Kp×Hata + Ki×∑Hata×Δt + Kd×(dHata/dt)
Parametre Ayarlama Yöntemleri
1. Ziegler-Nichols: Kp'yi artır, salınım başlayınca kritik değeri bul, formüllerle hesapla.
2. Deneme-Yanılma: Kp, Ki, Kd'yi tek tek ayarla, dengeyi bul.
3. Otomatik Tuning: Modern sistemler otomatik ayarlar.
Uygulama Alanları
1. Sıcaklık: Fırın, otoklav, kalıp ısıtma
2. Basınç: Kompresör, hidrolik
3. Seviye: Tank, silo
4. Hız: Motor, konveyör
5. Akış: Pompa debisi
PID vs On-Off
On-Off: Basit, ucuz ama kararsız. PID: Kararlı, hassas, enerji tasarruflu.
VFD ile PID Kullanımı
Pompa debisi kontrolü: Hedef 100 L/dk, mevcut 85 L/dk, hata 15. PID hesaplar: Motor hızı %65'ten %75'e çıksın. VFD hızı artırır, debi hedefe ulaşır.
Yaygın Sorunlar
Sürekli Salınım: Kp/Ki yüksek. Yavaş Yanıt: Kp düşük. Aşım: Kd yetersiz. Steady-State Hata: Ki yok/düşük.
İleri Seviye: Cascade PID
İç içe iki PID. Dış PID: Sıcaklık, İç PID: Valf pozisyonu. Daha hassas kontrol.
Anti-Windup
İntegral terimi çok büyürse sınırla, kontrol kaybını önle.
PID Kütüphaneleri
Siemens: CONT_C, Allen Bradley: PID instruction, Arduino: PID_v1
PID, endüstriyel otomasyonun beynidir. Doğru ayar ile mükemmel performans.